Over speeding is one of the major factors of road crashes and fatalities around the world including India. Speed violation detection system, which is basically a part of intelligent traffic enforcement systems, is a highly advisable tool today to overcome this issue. The system has a centralized approach to modern traffic management and it is capable of reducing such mishappenings.
There are three variants of speed detection technologies available in the market today.
Radar based SDS
Radar based speed detection system works on the principal of Doppler Effect. The device emits the radio wave at a set frequency which is reflected by the target vehicle. The frequency of the reflected radio waves is different from the transmitted waves, and from that difference speed of the vehicle is calculated.
Laser based SDS
 Laser based speed detection system emits a narrow, focused laser beam comprising a series of pulses which the target vehicles reflect back to the source. The time of complete trip of these pulses from emission to bouncing back is measured and that becomes the basis for the calculation of the speed of the vehicle.
Laser based speed detection system emits a narrow, focused laser beam comprising a series of pulses which the target vehicles reflect back to the source. The time of complete trip of these pulses from emission to bouncing back is measured and that becomes the basis for the calculation of the speed of the vehicle.
The Radar and Laser based speed detections are though so efficient but they have certain limitations as well.
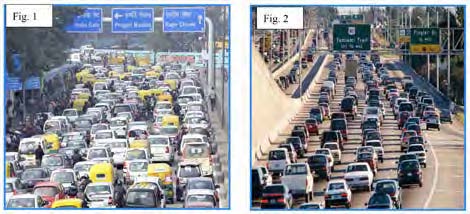
- Cosine factor – Radar and laser based speed detection systems can record true speed only if they are in the line of the vehicles path which is not suitable for unorganized non-lane based traffic scenario like in India.
- If the radar is positioned at an angle to the path of the vehicle, the apparent speed of the vehicle is reduced. The reduction in speed is proportional to the cosine of the angle. The Radar based speed system cannot differentiate between two vehicles which are at different speed but are adjacent to each other. Hence, the speed detected through this system cannot be relied upon for evidence in the Indian court of law.
- Laser system works well when triggered straight to the vehicles. In gantry architecture it does not follow its own principle, hence its accuracy cannot be relied upon.
- Both Laser and Radar systems are calibrated while running parallel to the ground and in the direction of the moving vehicle; when they are fitted at 6.5mtrs height they contradict their own calibrating methodology.
- Both Laser and Radar system requires yearly calibration. Since, these systems are not manufactured in India; they are sent outside, and during that course of time the system does not work.
- Both Laser and Radar systems require at least 3 feet of horizontal separation between two vehicles to detect speed, which is not really possible in bumper to bumper traffic as seen on Indian roads.
Video based speed detection system
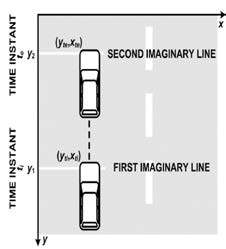 Video based speed detection system works on speed-time-distance concept and uses image processing technique. It uses a video scene, comprising starting reference point of moving vehicle (e.g.,Y1(Yth, Xth)) and end point of reference (e.g., Y2(Yte,Xte). The distance (D) between Y1 and Y2 is already known. The vehicle is detected at Y1 at time t1, and Y2 at t2; the difference (T=t2-t1) of time is procured. Vehicle speed (S) is then calculated on the simple formula of Speed=Distance/ Time.
Video based speed detection system works on speed-time-distance concept and uses image processing technique. It uses a video scene, comprising starting reference point of moving vehicle (e.g.,Y1(Yth, Xth)) and end point of reference (e.g., Y2(Yte,Xte). The distance (D) between Y1 and Y2 is already known. The vehicle is detected at Y1 at time t1, and Y2 at t2; the difference (T=t2-t1) of time is procured. Vehicle speed (S) is then calculated on the simple formula of Speed=Distance/ Time.
The control processor activates the camera to capture the image of the speeding vehicle in accordance with the speed controls.
Features of video based speed detection system
- Cameras are used for speed detection and each vehicle is captured individually.
- Calibration methodology is as per the ground installation..
- Since video based speed detection system track number plates only and each number plate is an individual transaction, hence, horizontal separation does not make a factor in calculating the speed of the vehicle.
- Doesn’t require periodic calibration.
- Does not use any inductive loop sensors/ radar/ laser.
Conclusion
Considering various aspects of the speed detection technologies, video based speed detection system is most suitable for accuracy of speed with the details of vehicle number plates, for the road scenario like that in India where traffic is not so disciplined and there is a prevalence of non-lane based traffic incidences.